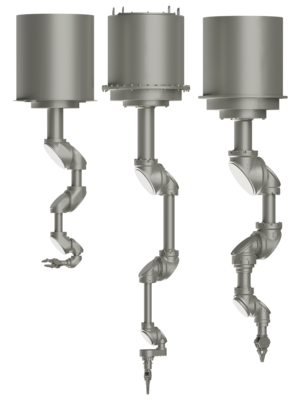
The hermetically sealed gear-driven structure maintains resistance to acid corrosion, radiation, and high temperatures. It supports seven-DOF compound motion with real-time force feedback, motion trajectory library editing/management, and system self-diagnosis, ensuring safe and reliable operation.
| DM4U800 | DM10900 | DM201050 |
Maximum Reach | 800mm | 900mm | 1050mm |
Maximum Load | 4kg | 10kg | 20kg |
Repeatability Positioning Accuracy | ±0.2mm | ±0.2mm | ±0.2mm |
Master-Slave Response Time | <0.1s |
|
|
|
|
|
Degrees of Freedom (DOF) | 6+1 (Joint+Gripper) |
Motion parameters of each axis | J1 | ±360° | ±360° | ±360° |
J2 | ±130° | ±130° | ±130° |
J3 | ±150° | ±150° | ±150° |
J4 | ±150° | ±360° | ±360° |
J5 | ±360° | ±360° | ±360° |
J6 | ±360° | ±360° | ±360° |
J7 | / | / | / |
|
|
|
|
|
Operating Environment | Temperature | -40~300℃ |
Humidity | Submersible Robotic Arm |
*The specific values should be based on the actual measurements. |